研究内容Research
無人航空機による利用システム
4.固定翼UAVを用いて遮蔽環境下でも長距離映像伝送可能な中継伝送技術
研究概要
近年、無人航空機(UAV)を用いた利用が進んでおり、今後はUAVでの観測においてリアルタイム映像伝送が求められると同時に、観測エリアの広域化、観測場所までの飛行距離増大により、自律飛行するUAVの利用が進むと予想されます。
このような状況を鑑み、山岳などの遮蔽環境でもUAVによる遠距離の広大なエリアの観測映像を伝送するため、長時間対空可能な固定翼自律UAV及び、その搭載に適した小型映像中継装置、見通し内外対応が可能な遠隔監視制御装置、アンテナ指向制御方式を有する映像中継システムを提案しています(図1)。
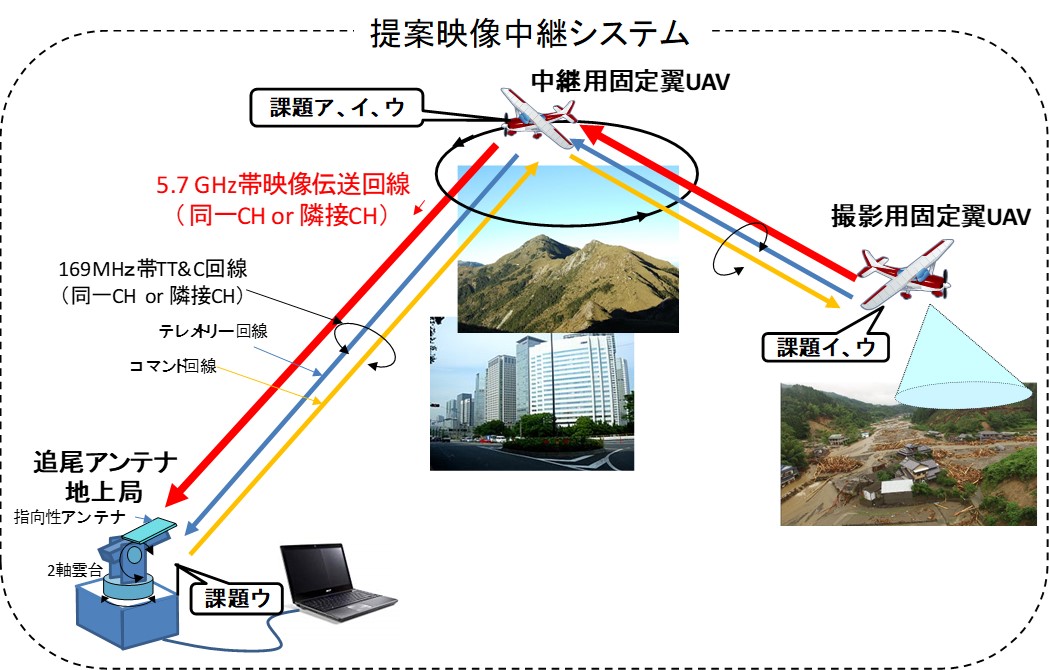
図1 映像中継システムイメージ
本研究室では様々存在する課題の内、長時間対空可能な固定翼自律UAV技術、映像伝送・中継及びUAV遠隔監視制御情報の長距離伝送技術及びUAV搭載用アンテナ指向方向制御技術についての研究・開発をしています。
固定翼UAV搭載用アンテナ指向方向制御技術
目的
想定速度で最大30°のバンクあるいはラダーよる旋回時ののアンテナ指向方向変動範囲及びその角速度をシミュレーション等により把握します。この結果よりアンテナを所望の角度範囲に向けることが可能な多軸ジンバルを選定あるいは設計を行います。
進捗状況
2軸ジンバルを含む固定翼UAV(図2)のダイナミクスを導出し、図3に示すようなアンテナ指向方向制御系を構成・設計しました。提案した制御系を用いて、半径100m、速度22m/s、バンク角30°程度で旋回時のアンテナ指向方向制御誤差をシミュレーション評価を行いました。この結果、0.86°(rms値)は要求アンテナ指向方向制御精度(送信3°、受信1.3°)を満たすことを確認しました(図4)。
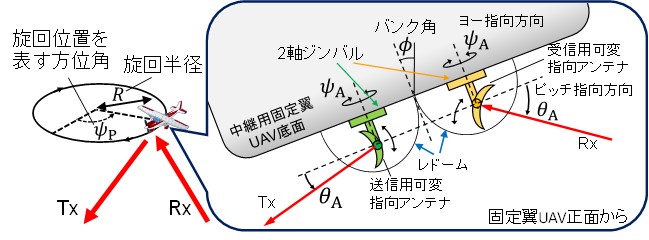
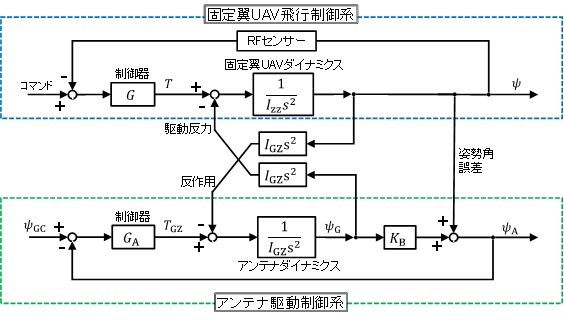
図2 固定翼UAVと搭載2軸ジンバル 図3 アンテナ指向方向制御系構成
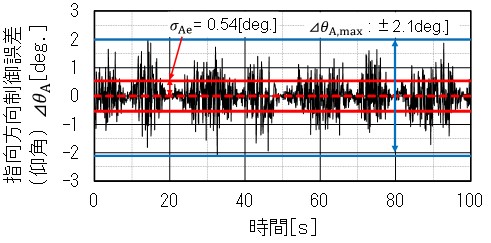
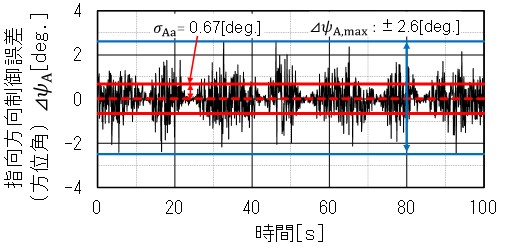
図4 アンテナ指向方向制御系シミュレーション結果
長時間対空可能な固定翼自律UAV技術
目的
本体重量8kg以下、搭載機器及び燃料重量2.5㎏の固定翼UAVにて飛行時間1時間可能なことを手動あるいは自律により飛行実証します。さらに、位置偏差20mにて半径100mにて旋回飛行しつづけることが可能な固定翼UAVの飛行制御系を設計、シミュレーションにより確認します。
進捗状況
総重量と燃料重量の関係を解析し、飛行実験により妥当性を検証。総重量8㎏、1㎏の燃料で1時間飛行可能なことを明確化しました(図5)。
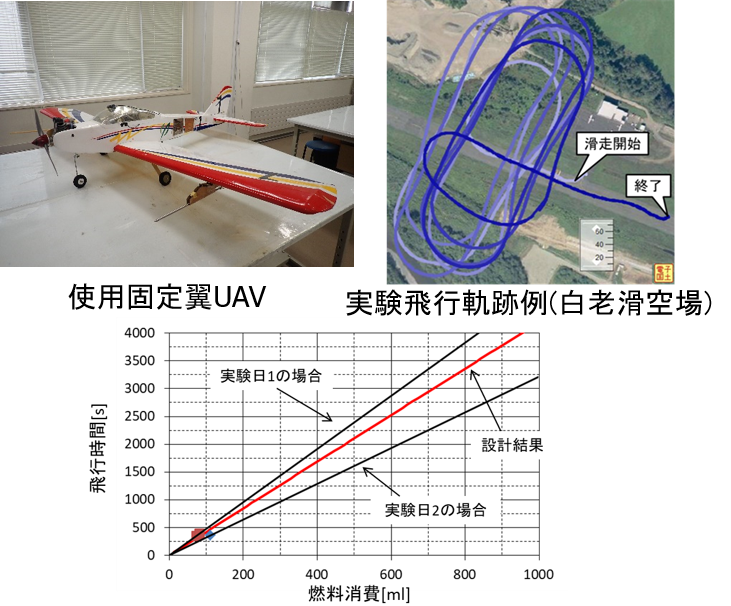
図5 総重量・飛行時間と燃料の関係の実験的推算
半径100mを維持する旋回経路追従飛行制御を考案し、シミュレーションにより風速5m/sでも半径・高度偏差3ⅿ以内に抑制可能なことを確認しました(図6)。
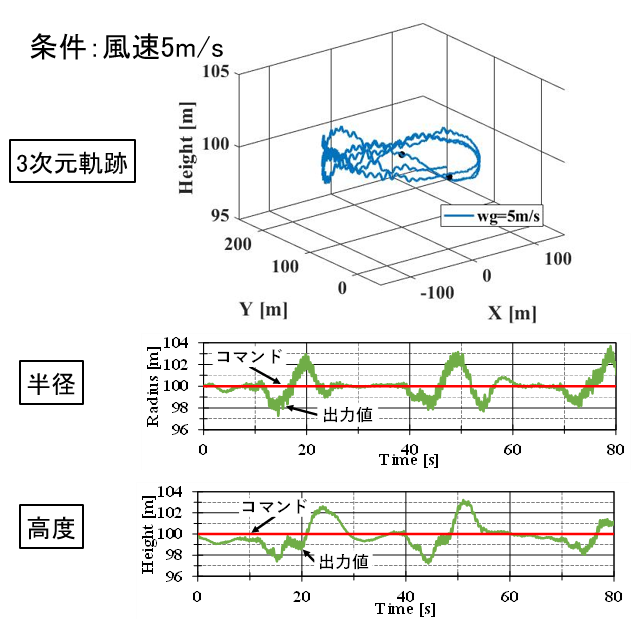
図6 旋回経路追従制御系のシミュレーション評価
謝辞
本研究は総務省SCOPE(JP215001002)「山岳などによる遮蔽環境下での被災地映像を固定翼UAVを中継局として伝送する同一・隣接チャネルでの映像伝送・監視制御技術の研究開発」により実施した。このページの先頭へ

